出門不想另外帶一台相機或運動相機,大約就只能用手機替代。
但手機的錄影功能卻又沒相機好??
那可不一定。
我一直在找一隻可以取代相機的手機。
本來想說大約就各廠牌的旗艦手機,但後來發現VIVO的X系列好像可以。
尤其 vivo x60 pro,搭載蔡司鏡頭以及微雲台,簡直了。
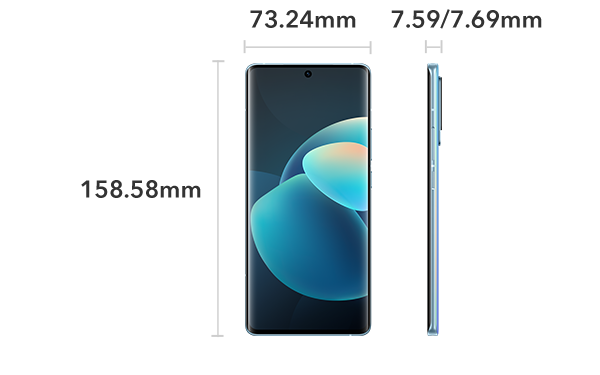
- 尺寸: 158.58x73.24x7.59
- 重量: 177g
- 處理器 高通S870
記憶體 12GB
內建使用記憶體 256GB
電池容量 4200mAh (標準值)
快速充電 33W 閃充
指紋辨識 隱形指紋辨識
顏色 冰極光 / 迷霧黑
作業系統 Funtouch OS 11.1 Global(基於Android 11)
-
螢幕尺寸 6.56吋
-
螢幕解析度 FHD+ 2376*1080
-
螢幕材質 AMOLED
-
刷新率 120Hz刷新率
-
觸控螢幕 電容式多點觸控
-
相機
前置 3200萬畫素f/2.45 / 後置 4800萬畫素 f/1.48+1300萬畫素f/2.46(專業人像)+1300萬畫素f/2.2(廣角微距)
-
閃光燈
後置閃光燈;前置螢幕補光
-
拍照模式
極夜模式、夜景、人像、拍照、錄影、4800萬、全景、動態照片、慢鏡頭、延時攝影、專業模式、AR萌拍、超級月亮、文檔矯正、星空模式、運動抓拍、時光慢門
-
Wi-Fi
支持 2.4G/5G Wi-Fi MIMO, 支持 Wi-Fi 6
-
藍牙
Bluetooth 5.1
-
USB
USB Type-C,USB 2.0
-
GPS
支援
-
OTG
支援
-
NFC
支援
IM
雙Nano
-
待機模式
5G+4G 雙卡雙待
-
2G GSM
850/900/1800/1900MHz
-
3G WCDMA
B1/B2/B4/B5/B8
-
4G FDD-LTE
B1/B2/B3/B4/B5/B7/B8/B12/B17/B18/B19/B20/B26/B28/B32
-
4G TDD-LTE
B38/B39/B40/B41
-
5G
n1/n3/n7/n28/n40/n41/n78
-
重力感應
支援
-
光線感應
支援
-
距離感應
支援
-
電子羅盤
支援
-
陀螺儀
實體
-
Hi-Fi
不支援
-
音訊支援格式
WAV、MP3、MP2、MIDI、Vorbis、APE、FLAC
-
影片支援格式
MP4,3GP,AVI
-
影片錄製格式
MP4
-
錄音
支援
-
定位
-
GPS, BEIDOU, GLONASS, GALILEO, QZSS
-
-
包裝盒內容
-
X60 Pro
XE710(3.5mm插頭)+Type-C轉接線
說明書
USB線
充電器
取卡針
保護殼
保護膜
-
請問 x50pro x60 x60pro 拍照錄影會差很多嗎?還有使用上的優劣.
而且X60系列S870效能還是遠比X50 Pro好不少
所以:
預算較低/要潛望式鏡頭 X50 Pro
遊戲效能跟相機兼具 X60
有預算直上 X60 Pro
vivo X60 Pro的相機功能》

vivo X60 Pro的主鏡頭使用的是Sony IMX598 4800萬畫素感光元件,尺寸為1/2吋,比起vivo X60
Pro+尺寸為1/1.3吋的GN1小了不少,不過vivo X60 Pro的主鏡頭還加入了第二代的微雲台,相比較起來筆者覺得vivo X60
Pro的配置會比較好用,畢竟主鏡頭才是最常使用的鏡頭,而且光圈來到F/1.48超大的光圈,相信拍照表現不會比vivo X60 Pro+差太多。
超廣角鏡也是微距鏡,1300萬畫素,光圈為F/2.2,人像鏡頭也是1300萬畫素,光圈為F/2.46,這兩個鏡頭的感光元件未知,即使缺少了vivo
X60
Pro+的潛望鏡,這三個主流鏡頭已經可以滿足日常的拍攝。整個鏡頭模組內的三個鏡頭在ZEISS的加持之下,不管是軟體還是硬體,皆有不俗的表現,以下將一邊介紹軟體一邊作實拍的展現。
 本次,vivo X60
Pro針對上一代產品來說,升級了第二代微雲臺技術,手持拍攝更加穩定。相對於OIS防抖來說,微雲臺內部不存在相對位移,而是100%模組的整體防抖,可實現多個方向數倍於OIS的防抖校正,相機模組和CMOS感測器的運動幅度整齊劃一,提供了趨近於完美的防抖能力。拍照模式
本次,vivo X60
Pro針對上一代產品來說,升級了第二代微雲臺技術,手持拍攝更加穩定。相對於OIS防抖來說,微雲臺內部不存在相對位移,而是100%模組的整體防抖,可實現多個方向數倍於OIS的防抖校正,相機模組和CMOS感測器的運動幅度整齊劃一,提供了趨近於完美的防抖能力。拍照模式
極夜模式、夜景、人像、拍照、錄影、4800萬、全景、動態照片、慢鏡頭、延時攝影、專業模式、AR萌拍、超級月亮、文檔矯正、星空模式、運動抓拍、時光慢門
\
網上實在找不到錄影相關數據,但有4K 60FPS。就我而言,基本就打趴一堆相機。
雖然X系列已經出到X90了,但好像X60性價比較優。
X50就差個蔡司鏡頭及CPU差頗多,X70和X60相機差不多,X80就CPU不行。X90還沒研究。
如果$$夠深,就全部買丫。
如果錢不夠大約買X60,但VIVO手機有很多版本,買的時候要注意的。最後,就是X60 PRO有個硬傷,就是螢幕有綠線的災情,唉。