1.東北角紫菜坪(蝙蝠洞)釣點:
位於東北角瑞濱蝙蝠洞旁的私房景點紫菜坪,一年四季靠岸的魚種非常的多樣,適合岸拋、磯釣等等!
但出發前請注意一下浪況,東北角紫菜坪(蝙蝠洞)屬於較危險的磯釣釣點釣場,因為海浪會直接打上岸!
2.基隆中正區正濱漁港釣點:
位於基隆舊漁會旁小巷進入的正濱漁港,可說是釣友們非常喜愛的舒適釣點之一,
夏季也時常有白帶魚靠近,湧進大批釣客爭相作釣,正濱漁港可算是基隆一年四季都非常熱鬧的漁港之一喔!
地址:基隆市中正區中正路近武昌街舊漁會旁
3.基隆八斗子綠燈釣點:
位於基隆八斗子漁港內的綠燈塔,若說是基隆釣魚界的一級戰場非它莫屬了!
一年四季湧入作釣的人潮可說從不間斷!白天以岸拋鐵板居多,時常還可以看到海龜出沒喔!
至於夜晚就不用多說啦~~當然是釣白帶魚的歡樂天堂!
基隆八斗子綠燈屬於較擁擠的釣點,到此作釣別忘了注意釣魚禮節喔~
4.基隆嶼釣點:
基隆嶼,又稱為基隆島,是位於台灣東北方的東海海域之島嶼,古稱雞籠嶼、雞籠逸杙,
無人島由於孤懸海上,故成為基隆與北海岸地區明顯的自然地標,
如要登島作釣須向基隆漁會申請釣魚證才可以登島(基隆嶼)喔!
登島船家資訊:富澤號 0972981161 (謝老師)
溫馨提醒:請保持環境乾淨整潔、隨時注意浪況、結伴同行、請記得務必穿著救生衣、防滑釘鞋!切勿貪釣!
5.東北角馬崗潮間帶釣點:
每當秋冬來臨,磯釣熱絡起來,馬崗,這一個釣點釣友們一定要認識啊!!!
冬季來臨,東北季風引起藻類滋生,部分岩石上生長出各類藻餌,冬季是浮游磯釣旺季,
提起濱海公路磯釣場,東北角馬崗潮間帶釣場,絕對是一個好選擇!
溫馨提醒:請保持環境乾淨整潔、隨時注意浪況、結伴同行、請記得務必穿著救生衣、防滑釘鞋!切勿貪釣!
6.北海岸金山水尾漁港釣點:
水尾漁港屬於小型港口,港口街為小型船舶停靠,算是北海岸乾淨的港口之一,
魚種眾多,釣場舒適,金山水尾漁港適合攜帶闔家大小學習體驗釣魚的樂趣唷!
旁邊還有神秘海岸景觀 值得一看 千萬不可錯過~
附近可以到金山老街逛街用餐 : )
有興趣參考這一篇喔→ 陽明山竹子湖繡球花海轉金山老街神祕海岸水
地址:新北市金山區民生路2號
7.東北角深澳漁港釣點:
深澳漁港位於瑞芳區的濱海公路上。從台北出發,走中山高速公路接大華交流道接62快速道路往瑞濱方向,
62快速道路的終點瑞濱交流道後左轉走台二線,約500公尺後即可看到深澳漁港的指標,右轉進去就是深澳漁港了!
深奧海岬、象鼻岩、酋長岩是位在漁港最裡面的自然景觀,在漁港邊可以看到許多漁船,
這裡是北台灣補小卷、透抽的重要漁港。深澳漁港舊名「番仔澳」。番仔澳這個名字的起源有兩個說法,
一是這裡為昔日平埔族凱達格蘭人居住的村落,另一個說法為深澳岬的巨岩,從側面看過去很像印地安人的臉龐,
所以被稱為「番仔澳」。
地址:深澳漁港位於新北市瑞芳區深澳里深澳路20號
8.基隆和平島白燈釣點:
白燈位於基隆和平島,為管理釣場,適合磯釣、岸拋、路亞、沉底各式釣法,
須提前一星期登記報名,釣場規定入場須攜帶身分證、穿著救生衣、防滑釘鞋、嚴禁喝酒
汽機車一律停在停車場。
9.東北角水湳洞漁港釣點:
水湳洞漁港與陰陽海相鄰,陰陽海的顏色是因為金瓜石山區含豐富礦物質的溪水流入大海所造成的,
當季水湳洞漁港內有許多硬尾仔、尖梭,是許多釣友喜愛的釣點之一唷~
10.基隆外木山漁港釣點:
背山面海,視野開闊是眺望海景極佳的所在,俗名「木山澳」的外木山漁港,
漁產豐富,海釣業興起,附近設有海水游泳池,不分早晚都有民眾前往游泳、釣魚、賞景。
地址:基隆市中山區文化路92巷34-2號
11.東北角萊萊磯釣場釣點:
臨近馬崗潮間帶的萊萊磯釣場為東北角海岸海蝕平臺中最發達的地區,極適合藻類、浮游生物生長,
擁有繁盛的魚類生態。說到萊萊磯釣場,絕對是磯釣釣友們眾所皆知的知名釣點喔!
背三貂角燈塔位於至高點,可以欣賞到美麗的海景、龜山島,也可以俯視馬崗村及萊萊磯釣場,
是個絕佳景點!有機會一定要親自前往看看大自然美麗的海景喔~
地址:新北市貢寮區北部濱海公路段東北角海岸線
12.東北角軍艦岩釣點:
軍艦岩的名稱由來,因為遠看就像一艘軍艦在海上航行,須從海上視角可看得見。
適合磯釣、釣軟絲!此釣點較為陡峭,若前往作釣請務必注意安全,裝備一定要齊全喔!
13.新北市萬里漁港釣點:
萬里區一共有四座漁港,野柳漁港、東澳漁港、龜吼漁港、萬里漁港(瑪鍊漁港)。萬里也是台灣海蟹的故鄉,台灣八成以上的海蟹都是由萬里捕蟹船捕撈上岸。
主要生產花蟹、三點蟹、石蟳...等等。港內和防波提上時常都可以看見許多釣客在作釣,
環境舒適又平坦,魚類眾多,有時還可以釣到螃蟹喔!
釣友們別錯過一起來探索萬里漁港吧~
地址:新北市萬里區瑪鍊溪溪口右側
14.北海岸草里漁港釣點:
草里漁港原名阿里荖,位於新北市石門區草里里淡金公路旁,民國70年起陸續興建漁港相關設施,
目前港內僅有少量小型漁船,是小型的漁港。每到硬尾仔靠岸的季節,港內可見擠滿釣客的壯觀景況!
15.新北市萬里龜吼漁港釣點
龜吼漁港沒有像知名的富基漁港等來的有名氣,也不是個大漁港,但海產新鮮便宜,停車方便,
龜吼漁港的捕魚船入港後,魚貨卸貨會直接拍賣,龜吼漁港港邊有多間餐廳,作釣肚子餓的話,
可以直接去大快朵頤品嚐新鮮的海產料理唷!
溫馨提醒:請保持環境乾淨整潔、隨時注意浪況、結伴同行、請記得務必穿著救生衣、防滑釘鞋!切勿貪釣!
2022年8月19日 星期五
台灣北部磯釣、海釣、堤防釣、防波堤釣點筆記
2022年8月17日 星期三
Titan GT77頂級旗艦之作!
MSI 搭載第 12 代 Intel® HX 系列處理器的高效能筆電廣受市場好評,旗艦機皇 Titan GT77 也在近日正式登場,不僅搭載桌機等級效能的第 12 代 Intel® i9-12900HX 處理器,還有 NVIDIA® GeForce RTX™ 3080 Ti 筆記型電腦 GPU,透過 MSI Overboost 超增壓模式設計技術,可提供最高 250W 震撼效能!全新流線纖薄機身搭配投射式 Mystic Light bar 設計與 Cherry MX 超薄機械式鍵盤、Dynaudio 世界級音響模組與海量儲存空間,選購 Titan GT77 還享受 MSI Care Plus 全新推出的「意外損壞保障服務」(價值 NT$8,000),為您的心愛配備提供更全面的保護!
Titan GT77旗艦奢華電競筆電 產品規格
| 型號 | Titan GT77 12UHS-012TW |
| 處理器 | Intel® Core™ i9-12900HX |
| 顯示卡 | NVIDIA® GeForce RTX™ 3080 Ti GDDR6 16GB筆記型電腦GPU , 175W (150W+25W with Dynamic Boost) |
| 作業系統 | Windows 11 Pro |
| 螢幕 | 17.3吋UHD (3840*2160), 120Hz更新, 100% DCI-P3色域範圍 |
| 記憶體 | DDR5 64GB (32GB*2) , 4 Slot, 最高可擴充至128GB |
| 儲存裝置 | 8TB (2TB*4) M.2 SSD (NVMe PCIe) |
| 視訊鏡頭 | IR HD type |
| 鍵盤 | SteelSeries單鍵RGB全彩背光Cherry MX超薄機械式鍵盤 |
| 觸控板 | 加大設計玻璃觸控板 (130 x 82 mm) |
| 網路 | Killer E3100G LAN (Up to 2.5G) + Killer AX1675 Wi-Fi 6E w/ 藍牙 5.2 |
| I/O連接埠 | 2x Type-C (USB / DP / Thunderbolt™ 4) 3x Type-A USB3.2 Gen2 1x RJ45 1x SD 高速讀卡槽 1x (8K @ 60Hz / 4K @ 120Hz) HDMI 1x Mini-DisplayPort |
| 音效 | 2x 2W 揚聲器 + 2 x 2W 重低音喇叭, Dynaudio, 支援播放Hi-Res高解析音樂, Nahimic音效強化軟體 |
| 變壓器/電池 | 330W變壓器 / 4-Cell, 99 Whr超大容量電池 |
| 尺寸/重量 | 397 x 330 x 23 mm / 3.3kg |
| 配件 | MSI M99電競滑鼠、Titan尊榮電競後背包、雙用隨身碟128GB、MSI Lucky公仔鑰匙圈–極黑限定版 |
| 建議售價 | NT$ 169,900 |
Titan GT77 提供桌機等級的擴充性,4 組 DDR5 記憶體插槽,最高容量可擴充至 128GB,最高理論傳輸速率達到了
6.4Gbps。搭配 4x M.2 SSD (1 PCIe Gen5 , 3 PCIe Gen4) 硬碟空間設計,打造出最高達 8TB
的極速、海量儲存空間。強大硬體配置完美融合於不到一英吋的機身中,讓 Titan GT77 在使用上更有效率、擴充更具彈性。
2022年8月6日 星期六
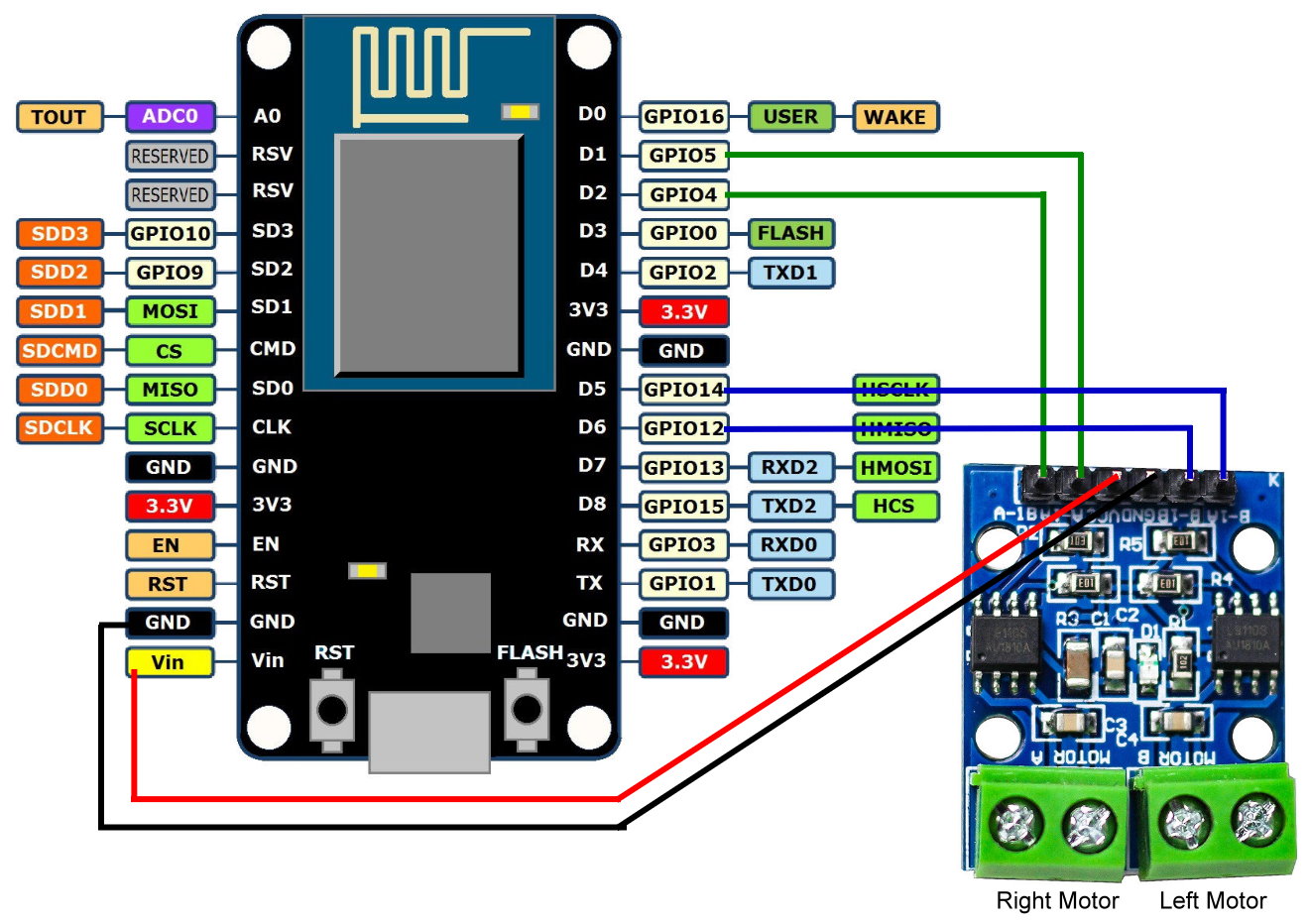
遙控船 #arduino #esp8266 #l9110s#wifi
/* Simple WiFi-controlled car on ESP8266
* and L9110S motor drive board
* by Alan Wang
*/
#include <esp8266wifi .h="">
#include <esp8266webserver .h="">
// WiFi settings
#define SSID_AP "ESP8266_WiFi_Car" // AP server name
#define PASSWORD_AP "12345678" // AP server password
// motor settings
#define RIGHT_MOTOR_PIN1 4 // pin 1 of right motor (D2)
#define RIGHT_MOTOR_PIN2 5 // pin 2 of right motor (D1)
#define LEFT_MOTOR_PIN1 12 // pin 1 of left motor (D6)
#define LEFT_MOTOR_PIN2 14 // pin 2 of left motor (D5)
#define RIGHT_MOTOR_SPEED 1023 // speed for right motor (0-1023)
#define LEFT_MOTOR_SPEED 1023 // speed for left motor (0-1023)
#define LED_PIN 2 // built-in LED (D4)
IPAddress local_ip(192, 168, 4, 1); //IP for AP mode
IPAddress gateway(192, 168, 100, 1); //IP for AP mode
IPAddress subnet(255, 255, 255, 0); //IP for AP mode
ESP8266WebServer server(80);
int car_mode = 0; // set car drive mode (0 = stop)
// initialize
void setup() {
Serial.begin(115200);
Serial.println("ESP8266 Wifi Car");
pinMode(RIGHT_MOTOR_PIN1, OUTPUT);
pinMode(RIGHT_MOTOR_PIN2, OUTPUT);
pinMode(LEFT_MOTOR_PIN1, OUTPUT);
pinMode(LEFT_MOTOR_PIN2, OUTPUT);
pinMode(LED_PIN, OUTPUT);
car_control(); // stop the car
WiFi.mode(WIFI_AP);
WiFi.softAPConfig(local_ip, gateway, subnet);
WiFi.softAP(SSID_AP, PASSWORD_AP);
// setup web server to handle specific HTTP requests
server.on("/", HTTP_GET, handle_OnConnect);
server.on("/forward", HTTP_GET, handle_forward);
server.on("/backward", HTTP_GET, handle_backward);
server.on("/left", HTTP_GET, handle_left);
server.on("/right", HTTP_GET, handle_right);
server.on("/stop", HTTP_GET, handle_stop);
server.onNotFound(handle_NotFound);
//start server
server.begin();
Serial.println("ESP8266 car server started.");
digitalWrite(LED_PIN, LOW);
}
// handle HTTP requests and control car
void loop() {
server.handleClient();
car_control();
}
// HTTP request: on connect
void handle_OnConnect() {
car_mode = 0;
Serial.println("Client connected");
server.send(200, "text/html", SendHTML());
}
// HTTP request: stop car
void handle_stop() {
car_mode = 0;
Serial.println("Stopped");
server.send(200, "text/html", SendHTML());
}
// HTTP request: go forward
void handle_forward() {
car_mode = 1;
Serial.println("Go forward...");
server.send(200, "text/html", SendHTML());
}
// HTTP request: go backward
void handle_backward() {
car_mode = 2;
Serial.println("Go backward...");
server.send(200, "text/html", SendHTML());
}
// HTTP request: turn left
void handle_left() {
car_mode = 3;
Serial.println("Turn left...");
server.send(200, "text/html", SendHTML());
}
// HTTP request: turn right
void handle_right() {
car_mode = 4;
Serial.println("Turn right...");
server.send(200, "text/html", SendHTML());
}
// HTTP request: other
void handle_NotFound() {
car_mode = 0;
Serial.println("Page error");
server.send(404, "text/plain", "Not found");
}
// control car movement
void car_control() {
switch (car_mode) {
case 0: // stop car
digitalWrite(RIGHT_MOTOR_PIN1, LOW);
digitalWrite(RIGHT_MOTOR_PIN2, LOW);
digitalWrite(LEFT_MOTOR_PIN1, LOW);
digitalWrite(LEFT_MOTOR_PIN2, LOW);
break;
case 1: // go forward
analogWrite(RIGHT_MOTOR_PIN1, RIGHT_MOTOR_SPEED);
digitalWrite(RIGHT_MOTOR_PIN2, LOW);
analogWrite(LEFT_MOTOR_PIN1, LEFT_MOTOR_SPEED);
digitalWrite(LEFT_MOTOR_PIN2, LOW);
break;
case 2: // go backward
digitalWrite(RIGHT_MOTOR_PIN1, LOW);
analogWrite(RIGHT_MOTOR_PIN2, RIGHT_MOTOR_SPEED);
digitalWrite(LEFT_MOTOR_PIN1, LOW);
analogWrite(LEFT_MOTOR_PIN2, LEFT_MOTOR_SPEED);
break;
case 3: // turn left
analogWrite(RIGHT_MOTOR_PIN1, RIGHT_MOTOR_SPEED);
digitalWrite(RIGHT_MOTOR_PIN2, LOW);
digitalWrite(LEFT_MOTOR_PIN1, LOW);
analogWrite(LEFT_MOTOR_PIN2, LEFT_MOTOR_SPEED);
break;
case 4: // turn right
digitalWrite(RIGHT_MOTOR_PIN1, LOW);
analogWrite(RIGHT_MOTOR_PIN2, RIGHT_MOTOR_SPEED);
analogWrite(LEFT_MOTOR_PIN1, LEFT_MOTOR_SPEED);
digitalWrite(LEFT_MOTOR_PIN2, LOW);
}
}
// output HTML web page for user
String SendHTML() {
String html = "";
html += "<html>";
html += "<head>";
html += "<title>ESP8266 WiFi Car</title>";
html += "<meta content="\" initial-scale="1\" name="\" viewport="" width="device-width,"></meta>";
html += "<style>body {background-color: Moccasin;} h1 {color: SaddleBrown;} h2 {color: Olive;}</style>";
html += "</head>";
html += "<body>";
html += "<div align="\" center="">";
html += "<h1>ESP8266 WiFi Car</h1>";
html += "<h2>Press \"stop\" after the server has been reset</h2>";
html += "<br />\n";
html += "<form method="\">";
html += "<input button="" forward="" o="" onclick="\" type="\" value="\" window.location.href="/forward" />";
html += "<br /><br />\n";
html += "<input backward="" button="" o="" onclick="\" type="\" value="\" window.location.href="/backward" />";
html += "<br /><br />\n";
html += "<input button="" left="" onclick="\" type="\" urn="" value="\" window.location.href="/left" />";
html += "<br /><br />\n";
html += "<input button="" onclick="\" right="" type="\" urn="" value="\" window.location.href="/right" />";
html += "<br /><br />\n";
html += "<input ar="" button="" onclick="\" stop="" type="\" value="\" window.location.href="/stop" />";
html += "</form>\n";
html += "</div>\n";
html += "</body>\n";
html += "</html>\n";
return html;
}
</esp8266webserver></esp8266wifi>